Una versione "semplificata" del moto dei due corpi¶
Note iniziali: Il problema viene risolto con l'uso delle differenze finite.
Per il calcolo delle condizioni iniziali non si è tenuto conto della conservazione del momento angolare ma solo della quantità di moto. La velocità della massa "piccola" viene inizializzata tangenziale, solo componente y.
import matplotlib.pyplot as plt
import numpy as np
import math
#dati iniziali
k = 1.5
M = 30.0
m = 0.5
x0m = 3.0
y0m = 0.0
vy0m = 2.5
dt = 0.0125
n = 2000
#massa "piccola"
pxm = []
pxm.append(x0m)
xm = x0m
pym = []
pym.append(y0m)
ym = y0m
vxm = 0
vym = vy0m
La posizione $x$ della massa M viene calcolata sfruttando la definizione di centro di massa, che viene fissato nell'origine: $m \cdot x_{0_m}+M \cdot x_{0_M}=0$
La velocità iniziale di M viene in una prima approssimazione sfruttando la conservazione della quantità di moto: $$ \begin{array}{ll} m \cdot v_{x_m}+M \cdot v_{x_M}=0 & m \cdot v_{y_m}+M \cdot v_{y_M}=0 \end{array} $$
#massa "grande"
pxM = []
pxM.append(-(m/M)*x0m)
xM = -(m/M)*x0m
pyM = []
pyM.append(-(m/M)*y0m)
yM = -(m/M)*y0m
vxM = 0
vyM = -(m/M)*vym
l'accelerazione si calcola utilizzando:
$$
F=k\dfrac{m \cdot M}{d^2}
$$
E sfruttando la similitudine fra il triangolo formato delle componenti della forza e il triangolo della posizione della massa (vedi figura): 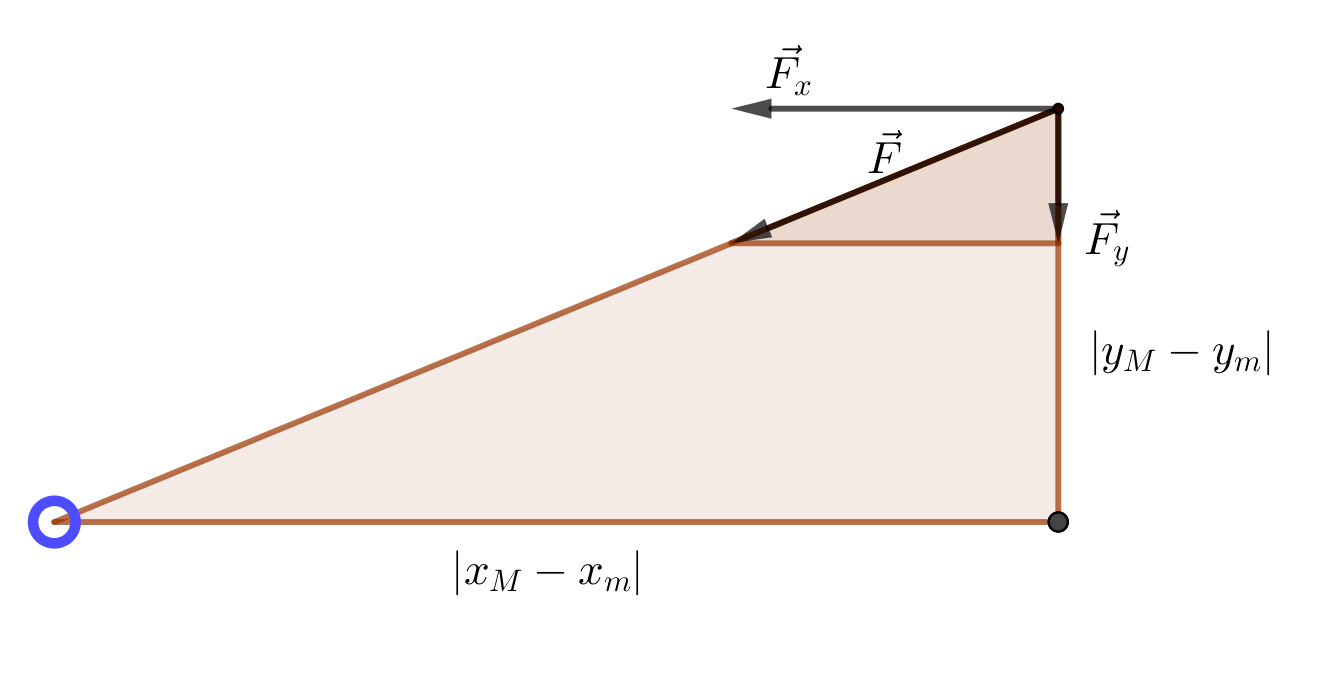
detto $d=\sqrt{(x_m-x_M)^2+(y_m-y_M)^2}$ si può costruire, ad esempio per la componente $x$, la seguente proporzione: $$ \dfrac{\left|\vec{F} \right|}{d}=\dfrac{\left|\vec{F_x} \right|}{\left|x_M-x_m \right|} \; \Rightarrow \; \left|\vec{F_x} \right|=\left|x_M-x_m \right| \dfrac{\left|\vec{F} \right|}{d} \; \Rightarrow \; \left|\vec{F_x} \right|=\left|x_M-x_m \right|\left( k \dfrac{m \cdot M}{d^3} \right) $$
for i in range(0,n):
#d distanza fra le masse
d = math.sqrt(math.pow(xm-xM, 2)+math.pow(ym-yM, 2))
"""calcolo accelerazione si usa la legge di
gravitazione universale"""
axm = -k*M*(xm-xM)/math.pow(d, 3)
aym = -k*M*(ym-yM)/math.pow(d, 3)
axM = -k*m*(-xm+xM)/math.pow(d, 3)
ayM = -k*m*(-ym+yM)/math.pow(d, 3)
"""calcolo della velocità si usano le
differenze finite: si ipotezza il moto
nell'intervallo di tempo dt ad accelerazione
costante"""
vxm = vxm+axm*dt
vym = vym+aym*dt
vxM = vxM+axM*dt
vyM = vyM+ayM*dt
"""calcolo della posizione si usano le
differenze finite: si ipotezza il moto
nell'intervallo di tempo dt a velocità
costante"""
xm = xm+vxm*dt
pxm.append(xm)
ym = ym+vym*dt
pym.append(ym)
xM = xM+vxM*dt
pxM.append(xM)
yM = yM+vyM*dt
pyM.append(yM)
pxm = np.array(pxm,dtype=np.float64)
pym = np.array(pym,dtype=np.float64)
pxM = np.array(pxM,dtype=np.float64)
pyM = np.array(pyM,dtype=np.float64)
plt.figure(figsize=(10,10))
#plt.xlim([0,n+100])
#plt.ylim([2.8,3.4])
plt.plot(pxm, pym, 'b-',pxM,pyM,'r-')
plt.show()
